Masterthesis im Bereich LLM-Finetuning & Simulation für Robotik
Gerhard Schubert Gmbh
Crailsheim, Germany
6 months ago
Role details
Contract type
Permanent contract Employment type
Full-time (> 32 hours) Working hours
Regular working hours Languages
GermanJob location
Crailsheim, Germany
Tech stack
Training Data
Automation of Tests
Cloud Computing
Python
Machine Learning
Microsoft Visual Studio
TensorFlow
PyTorch
Large Language Models
Prompt Engineering
Information Technology
HuggingFace
Job description
- Recherchieren aktueller Methoden zum Finetuning und Prompt Engineering von LLMs im Kontext robotischer Systeme und Simulationsumgebungen
- Aufbereiten und Generieren von Trainingsdaten - z. B. durch synthetische Daten, bestehende manuelle Tests oder Dokumentationen
- Entwickeln und Umsetzen eines Finetuning-Prozesses für ausgewählte LLMs wie HuggingFace, OpenAI oder LLaMA
- Evaluieren und Vergleichen der Performance der trainierten Modelle
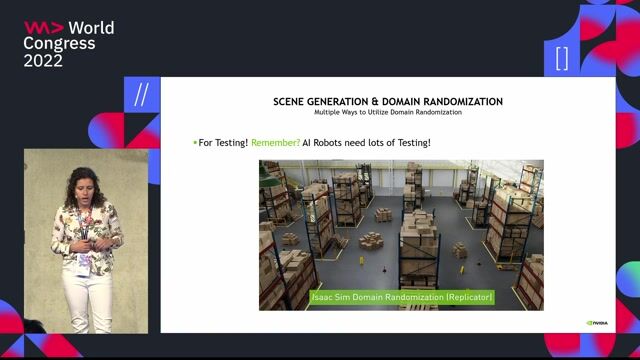
- Idealerweise: Integrieren der optimierten Modelle in bestehende Simulations- und Testumgebungen (z. B. NVIDIA Isaac)
- Dokumentieren der Ergebnisse und Ableiten konkreter Handlungsempfehlungen für die Anwendung im produktiven Umfeld
Requirements
- Laufendes Studium in einem MINT-Fach (z. B. Informatik, Robotik, Mathematik, Elektrotechnik oder vergleichbar)
- Sehr gute Kenntnisse in Python sowie Erfahrung im Umgang mit Conda und Visual Studio Code
- Erste praktische Erfahrungen im Finetuning von LLMs oder im Einsatz gängiger Machine-Learning-Frameworks wie PyTorch, TensorFlow oder HuggingFace
- Wünschenswert: Verständnis für robotische Systeme, Simulationsverfahren und mathematische Modellierung
- Wünschenswert: Kenntnisse in Cloud-Technologien, Remote-Systemen oder automatisierten Tests
- Selbstständige, strukturierte Arbeitsweise und Begeisterung für Forschung und innovative Technologien
About the company
Als Teil der Gerhard Schubert GmbH sind wir, Schubert Motion, ein junger Entwicklungsstandort im Herzen von Dresden, nahe der Technischen Universität Dresden. Wir sind dafür verantwortlich, anspruchsvolle Softwarelösungen am Rande des technisch Machbaren im Bereich Robotik, Robotersteuerung, Predictive Maintenance sowie Simulation zu entwickeln.