Simulation & Sim2Real Engineer Robotics
Role details
Job location
Tech stack
Job description
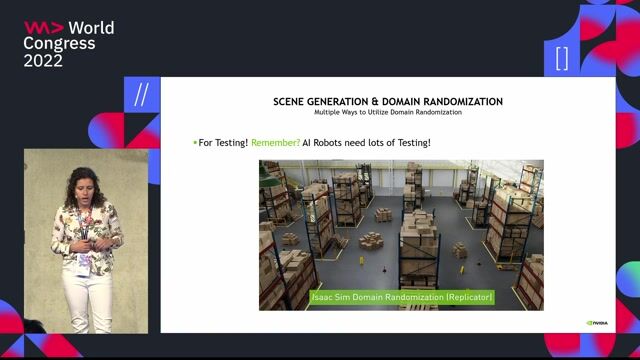
The AI Research Division of Agile Robots is looking for a Simulation & Sim2Real Engineer (m/f/d) Robotics who would be responsible for simulation-to-reality pipeline within AI Tools: building reproducible simulation workflows that generate synthetic training data, and developing learned realism models that close the gap between simulated and real sensor and actuator behavior., * Simulation Pipelines: Build and maintain task templates and episode generation workflows in Isaac Sim, MuJoCo, or Cosmos, with deterministic configs, seeds, and CI-integrated smoke tests.
- Synthetic Data: Produce synthetic ground truth outputs (segmentation, depth, state, pose, contacts, rewards) at scale and with validated quality.
- Sensor Realism: Train and apply learned models that transform simulated sensor outputs into realistic observations, capturing noise, artifacts, blur, rolling shutter, compression, and lighting effects.
- Actuator Realism: Learn and apply actuator or dynamics residual models that map ideal simulated actions to real-world-like actuation behavior, including latency, backlash, saturation, compliance, and drift.
- Realism Integration: Provide the realism layer as a module with CLI/API and reproducible configs, pluggable into offline dataset generation, online sim augmentation, and downstream benchmarking.
- Transfer Evaluation: Evaluate sim-to-real quality through distribution matching, downstream task impact measurement, and ablation studies.
Requirements
Do you have experience in AI?, * Diffusion Models: Experience applying diffusion models for domain adaptation or style transfer tasks, including image-to-image and sequence-to-sequence transformations.
- Sensor Modeling: Understanding of camera pipeline artifacts, depth noise characteristics, and encoding or compression effects and how to model them as learned transformations.
- Actuator Modeling: Experience modeling real actuator behavior (latency, hysteresis, compliance, constraints) as learned or residual models rather than hand-tuned simulation parameters.
- Simulation Environments: Hands-on ownership of robotics simulation pipelines, including environment configuration, episode generation, and output validation., * Transfer Measurement: Experience measuring sim-to-real transfer quality through downstream task performance rather than visual similarity alone.
- Reproducible Pipelines: Experience with deterministic pipeline design, including handling GPU non-determinism, seed management, and cross-machine reproducibility.