Software Engineer - Simulation
Role details
Job location
Tech stack
Job description
We are looking for a Simulation Software Engineer to own and extend our simulation stack for robot learning. Simulation is at the core of our approach to scaling intelligence. You will be responsible for building and maintaining the infrastructure that enables training, evaluation, and deployment of learning-based control systems at scale. This is not a support role; you will own the simulation platform end-to-end, from physics fidelity to throughput optimization, and directly shape how our robots learn., * Own the simulation stack. You will design, build, and maintain the core simulation infrastructure used for robot learning, taking responsibility for its architecture, reliability, and evolution. This includes making key decisions across physics, rendering, and data pipelines, and ensuring the system scales with our needs.
- Push simulation fidelity. You will develop and refine models for contacts, actuators, deformables, and sensors to reduce the sim-to-real gap. This involves both improving physical realism and building the tools needed to validate the simulation against real-world behavior.
- Scale training throughput. You will optimize the simulation stack for massively parallel reinforcement learning, implementing efficient multi-GPU and multi-node pipelines. You will identify and remove bottlenecks across compute, memory, and data movement to maximize training efficiency.
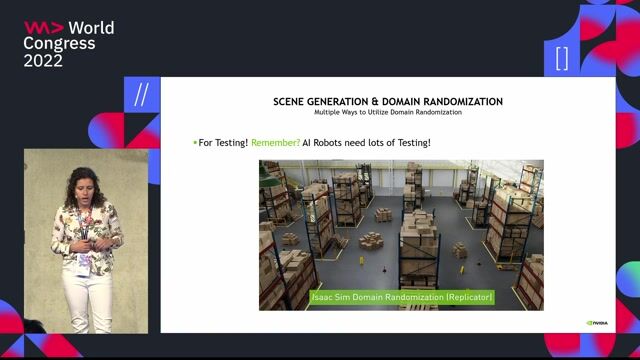
- Photorealistic rendering & synthetic data. You will integrate and extend rendering pipelines to support vision-based learning, including domain randomization and synthetic dataset generation for robust perception systems.
- Software-in-the-loop testing. You will maintain the infrastructure for validating policies and systems in simulation before deployment, enabling fast iteration cycles and reducing risk when transferring to real hardware.
- Collaborate across teams. You will work closely with engineers and researchers across RL, control, perception, and hardware to ensure simulation remains tightly aligned with real-world performance and deployment needs.
Requirements
- Strong experience building or extending simulation systems for robotics
- Hands-on experience with modern GPU-based simulators such as MuJoCo, Isaac Gym / Isaac Lab
- Proven track record of building simulation infrastructure used for learning-based robotics
- Excellent programming skills in Python and Pytorch
- Deep understanding of physics simulation (rigid body dynamics, contacts, actuators)
- Knowledge of GPU systems and performance optimization
Nice to have
- Experience with deformable objects, soft contacts, or complex actuation systems
- Experience with multi-GPU / distributed training systems
- Experience with Nvidia's War
Benefits & conditions
- Competitive compensation package
- A front-row seat at one of Europe's most ambitious robotics companies
- An energetic, collaborative team with a bias for action