Stud. Hilfskraft - Kontaktbehaftete Aufgaben in der Simulation mittels RL/Foundation Models
Role details
Job location
Tech stack
Job description
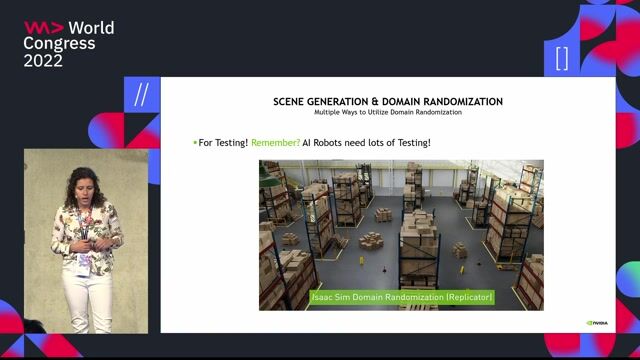
- Aufbau und Konfiguration physikbasierter Simulationsumgebungen (z. B. verschiedene Simulatoren und Robotermodelle)
- Modellierung und Implementierung kontaktreicher Handhabungs- und Montageoperationen in der Simulation
- Entwurf und Training RL-basierter Ansätze zum Lernen von Montageprozessen und dazugehörigen Richtlinien
- Untersuchung modernster Foundation-Modelle zur Modellierung und Generalisierung von Montageoperationen
- Erforschung generativer KI-Ansätze zur automatischen Generierung von Sequenzen von Fertigkeiten für Montageaufgaben
- Dokumentation und Präsentation der entwickelten Methoden und Ergebnisse, * Spitzentechnologie im Bereich der Roboter-Manipulatoren
- Praktische Arbeit mit unseren Robotern in Stuttgart
- Verantwortung und Freiheit, eigene Ideen umzusetzen
- Zusammenarbeit mit den besten Studierenden ihres Fachgebiets
Requirements
Ausschreibung für die Fachrichtungen wie z. B.: Automatisierungstechnik, Elektrotechnik, Informatik, Kybernetik, Maschinenbau, Mechatronik, Regelungstechnik, Softwaredesign, Softwareengineering, technische Informatik, Robotik, Autonome Systeme oder vergleichbare.
Kontaktintensive Montageaufgaben beinhalten oft komplexe physikalische Wechselwirkungen und eine hohe Empfindlichkeit gegenüber Parametereinstellungen. Bei einer großen Anzahl von Produktvarianten ist es nicht praktikabel, Prozessparameter für jede mögliche Variante manuell abzustimmen oder zu validieren, was Skalierbarkeit und Flexibilität in industriellen Anwendungen einschränkt., * Gültige Immatrikulation an einer Universität in Robotik, Informatik, Künstlicher Intelligenz oder einem verwandten Fachgebiet
- Erfahrung mit Robotik-Simulationsumgebungen wie Isaac Sim, MuJoCo oder Bullet
- Gute Programmierkenntnisse in Python, C++ und Erfahrung mit ROS (Robot Operating System)
- Erfahrung mit Frameworks des Maschinellen Lernens, insbesondere PyTorch
- Erfahrung in Reinforcement-Learning-Methoden
- Interesse oder erste praktische Erfahrung mit generativer KI, insbesondere Large Language Models (LLMs) und Vision-Language Models (VLMs)
- Erfahrung mit Roboter-Manipulatoren ist von Vorteil
- Fließende Englischkenntnisse