Robotics Software Engineer
Role details
Job location
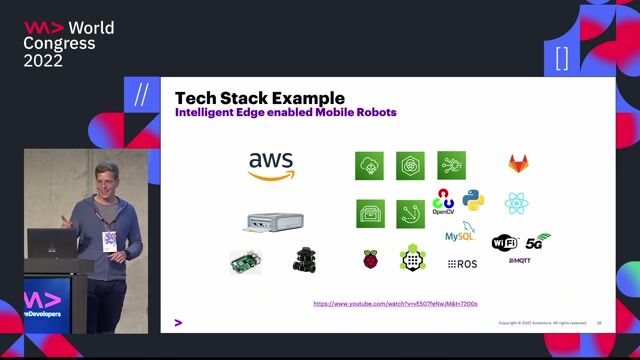
Tech stack
Job description
Insight Global is looking for a Robotics Software Engineer in the Warren, Michigan area. The engineer will be responsible for architecting and implementing a robust, scalable ROS 2 software stack that coordinates two robotic arms and enables advanced motion planning and 3D perception for complex manipulation tasks. You will own the end-to-end software lifecycle: from high-level architecture and simulation, down to real-time integration with industrial robot controllers, and 3D vision sensors.
Other Responsibilities:
- Lead the design and implementation of a ROS 2-based dual-arm control architecture (nodes, topics, services, actions, lifecycle) that supports coordinated and independent arm motions.
- Define interfaces and APIs for motion planning, perception, and gripper/tool management.
- Develop, tune, and deploy advanced motion planning and manipulation algorithms using MoveIt 2 for dual-arm coordination (bimanual tasks, handovers, collision-aware trajectories).
- Configure and maintain the kinematic models, planning scenes, and controllers for multiple robot arms and end-effectors.
- Ensure safe, efficient trajectory generation in cluttered and dynamic environments.
- Design and integrate 3D perception pipelines (point clouds, depth maps, 3D sensors such as Photoneo PhoXi, RealSense, ZED) for robust object detection, pose estimation, and scene understanding.
- Fuse perception outputs with the planning scene to enable dual-arm, multi-gripper manipulation strategies (e.g., grasp selection, re-grasping, handover).
- Write clean, efficient, production-quality C++ and Python code within the ROS 2 ecosystem (ament, colcon, ros2_control, MoveIt 2 plugins).
- Establish and maintain CI/CD pipelines, code reviews, unit/integration tests, and documentation for the dual-arm system.
Requirements
- Master's degree in Robotics, Computer Science, Software Engineering, Electrical Engineering, or a related field.
- Experience with ROS 2 - experience developing complex robotics applications using ROS 2 and its core concepts (Nodes, Topics, Services, Actions, lifecycle management).
- Experience with MoveIt 2 - Understanding of kinematics, dynamics, and motion planning frameworks
- Solid background in 3D computer vision and point cloud processing (PCL, OpenCV) for robotic manipulation tasks.
- Strong proficiency & recent experience in C++ and Python.
- Experience interfacing with industrial robots and 3D vision hardware (e.g., RealSense, ZED)., * Ph.D. in Robotics or a related field with a focus on manipulation and perception.
- Experience deploying ROS/ROS 2 systems in real-world, industrial, or manufacturing environments.
- Familiarity with behavior trees (e.g., BehaviorTree.CPP) for complex task orchestration.
- Experience with machine learning/deep learning techniques applied to robotic vision and grasping.
Benefits & conditions
$40/hr to $45/hr Exact compensation may vary based on several factors, including skills, experience, and education.
Benefit packages for this role will start on the 1st day of employment and include medical, dental, and vision insurance, as well as HSA, FSA, and DCFSA account options, and 401k retirement account access with employer matching. Employees in this role are also entitled to paid sick leave and/or other paid time off as provided by applicable law., Benefit packages for this role will start on the 1st day of employment and include medical, dental, and vision insurance, as well as HSA, FSA, and DCFSA account options, and 401k retirement account access with employer matching. Employees in this role are also entitled to paid sick leave and/or other paid time off as provided by applicable law.